Правила виконання польоту: Політ
Режими польоту
«3D» автоматичний режим
Для виконання польоту за попередньо створеним маршрутом застосовується режим 3D. Цей режим дозволяє виконати повністю автоматизований політ, включаючи автоматичний зліт та посадку - за умови попереднього налаштування відповідних параметрів у меню маршруту.
Умови для використання режиму 3D:
- наявність стабільного сигналу супутникової навігації (GNSS) є обов’язковою умовою для запуску та підтримки автоматичного режиму;
- всі налаштування маршруту повинні бути збережені та активовані до початку польоту.
У випадку втрати GNSS-позиціонування під час польоту:
- БпЛА автоматично перериває виконання маршруту;
- БпЛА переходить у режим утримання висоти та дрейфує за напрямом вітру;
- Оператор має негайно втрутитися, перейшовши в один з ручних режимів, наприклад: «Позиція», «GPS off», для стабілізації БпЛА.
Важливо: своєчасний перехід до альтернативного режиму забезпечує контроль над БпЛА навіть у випадках завад або втрати навігації.
«Позиція» режим ручного керування
Для виконання польоту в ручному режимі використовується режим «Позиція», який передбачає активну участь оператора у керуванні БпЛА.
Особливості режиму «Позиція»:
- керування здійснюється оператором за допомогою пульта дистанційного керування;
- за наявності стабільного сигналу супутникової навігації (GNSS):
- БпЛА утримує горизонтальне положення та висоту;
- у разі втрати GNSS:
- БпЛА втрачає фіксацію позиції і починає дрейфувати;
- потрібне ручне коригування положення за допомогою стіка керування (рис. 1, правий стік-8(R)).
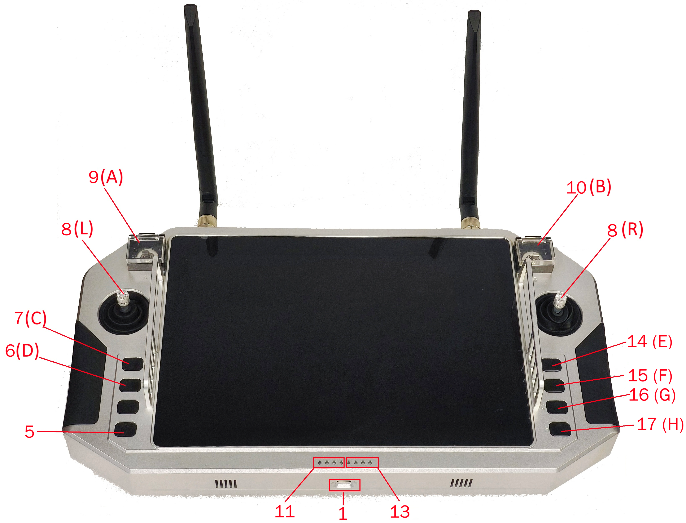
Рис. 1. Функціональні кнопки/перемикачі ПДК.
У режимі «Позиція», при наявності GNSS, доступні наступні автоматичні режими польоту:
- автоматичний зліт;
- автоматична посадка;
- «Return to home» автоматичне повернення.
«ATTL»
Режим «ATTL» - режим ручного керування без стабілізації в просторі, та без обмежень чутливості стіків керування для безпечного польоту. «ATTL» призначений для польотів в умовах сильного вітру який унеможливлює пілотування в режимі «Позиція», «GPS off», «3D».
Особливості режиму «ATTL»:
- БпЛА не використовує супутникову навігацію для стабілізації в просторі, політ здійснюється виключно під керуванням оператора;
- горизонтальне та вертикальне позиціонування виконується вручну;
- повністю розблокована тяга моторів (вісь вертикального руху):
- при надмірному натисканні стіку керування «вгору» або «вниз» можливе перевищення безпечного рівня тяги, що може призвести до втрати контролю або падіння БпЛА.
Умови безпечної експлуатації:
- зліт у режимі «ATTL» ЗАБОРОНЕНО;
- важливо: режим «ATTL» рекомендовано використовувати лише досвідченими операторами після проходження відповідного навчання.
«Return to home»
Режим автоматичного повернення до точки зльоту з подальшою автоматичною посадкою активується у таких випадках:
- автоматично при:
- втраті зв’язку між БпЛА та ПДК, якщо обрано відповідне налаштування;
- спрацюванні другого рівня розряду АКБ, якщо обрано відповідне налаштування.
- ручна активація можлива через меню автоматичних функцій (рис. 2).

Рис. 2. Автоматичні режим польоту.
Активація доступна в будь-якому режимі керування («3D», «Позиція», «ATTL»).
Важливо:
- Режим «Return to home» працює виключно при наявності стабільного GNSS-сигналу.
- У разі автоматичного спрацювання «Return to home» оператор може перервати виконання повернення, переключившись до ручного керування перемикачем 9(А) (рис.1):
- Позиція;
- ATTL.
Умови запуску:
- виконання польоту в автоматичному режимі можливе тільки за наявності супутникової навігації (GNSS);
- у разі втрати GNSS під час польоту:
- БпЛА перейде в режим «Позиція»;
- продовження польоту можливе лише у ручному режимі (наприклад, «Позиція», «GPS off» або «ATTL» — залежно від ситуації).
Перед запуском польоту в автоматичному режимі необхідно:
- Створити та налаштувати маршрут у додатку «Kazhan Station»
( розділ 5 «Програмне забезпечення»). - Перейти в меню збережених маршрутів (рис. 3 пункт 13).
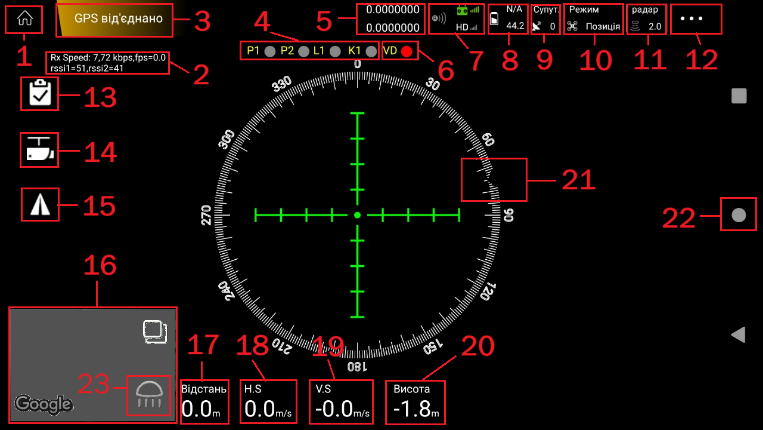
Рис. 3. Головний екран «Kazhan Station»
- Обрати потрібний маршрут.
- Розпочати виконання маршруту, натиснувши кнопку «Старт» (рис. 4).
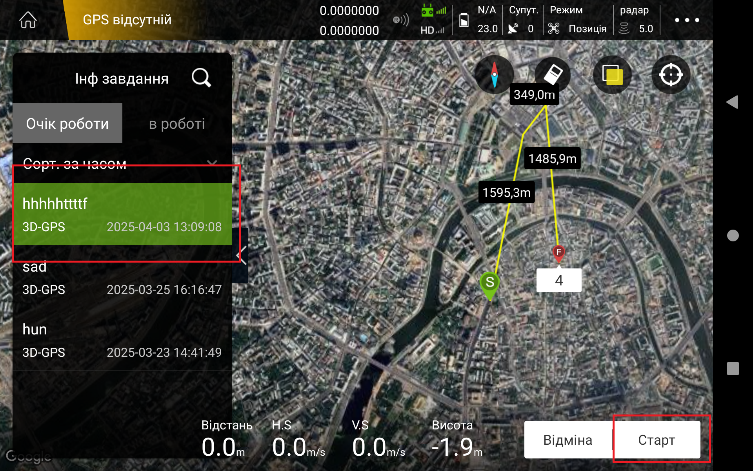
Рис. 4. Виконання маршруту
У меню налаштувань маршруту необхідно встановити відповідну швидкість польоту (рис. 5), враховуючи такі фактори:
- масу навантаження на БпЛА;
- швидкість і напрямок вітру на запланованій висоті польоту;
- загальну довжину маршруту (для оптимального використання ресурсу АКБ).
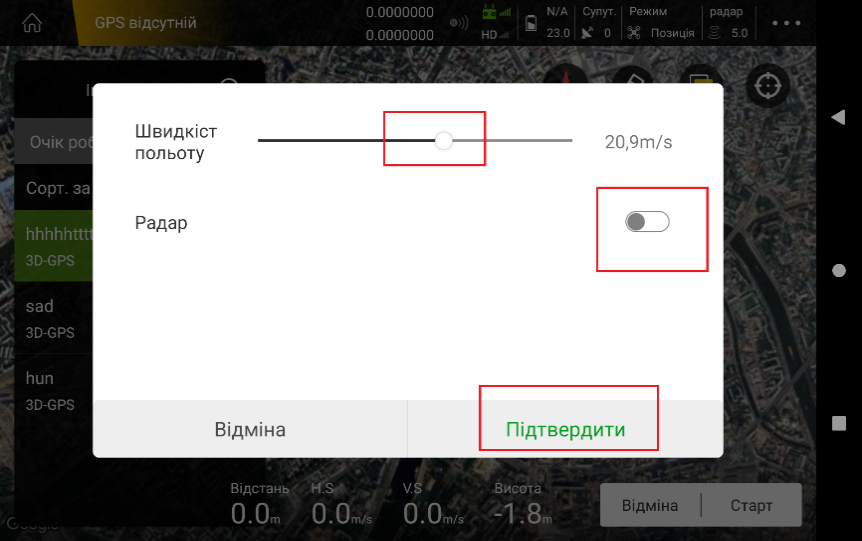
Рис. 5. Налаштування швидкості
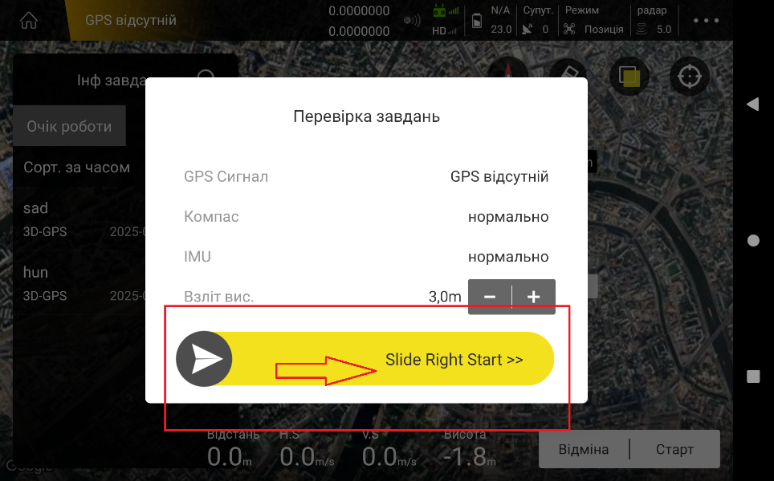
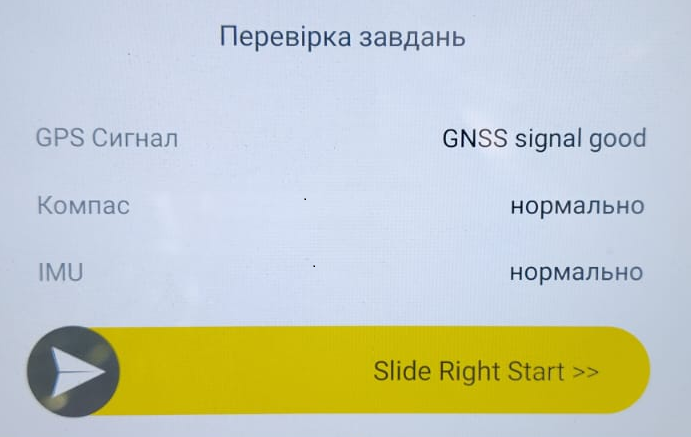
Для запуску автоматичного зліту при виконанні польоту в автоматичному режимі:
- Активуйте кнопку початку виконання маршруту шляхом переміщення зліва на право (рис. 6, рис. 7 ).
- БпЛА виконає автоматичний зліт на висоту задану в меню налаштувань маршруту (рис. 6).
- Після досягнення встановленої висоти БпЛА автоматично розпочинає рух за маршрутом до першої граничної точки, після чого продовжуйте виконувати побудований маршрут.
Не рекомендується робити автоматичний зліт з огляду на збільшену витрату ємності батареї і безпеку пілотування БпЛА з боєкомплектом.
Завершення маршруту
- Визначається заздалегідь встановленими параметрами в налаштуваннях:
- автоматичне повернення;
- посадка на фінальній точці;
- зависання тощо.
Під час виконання маршруту в автоматичному режимі оператор повинен постійно контролювати основні параметри системи:
- RSSI - рівень сигналу зв’язку між ПДК та БпЛА;
- заряд АКБ - для недопущення аварійного розряду;
- стан супутникової навігації (GNSS) - автоматичний режим працює лише за наявності сигналу.
Призупинення та відновлення маршруту:
- для призупинення маршруту натисніть кнопку «Пауза» у правому нижньому куті екрану;
- для переходу до ручного режиму керування перемістіть перемикач 9(А) (рис. 1) з середнього у нижнє положення (до себе) — активується режим «Позиція». Або натиснути правий стік 8(R), що приведе до активації режима «Позиція».
Відновлення маршруту після паузи:
- щоб продовжити виконання маршруту, натисніть кнопку «Продовжити»;
- БпЛА автоматично повернеться до точки припинення маршруту і продовжить виконання польоту.
Політ в ручному режимі
Крейсерська швидкість:
- рекомендована швидкість: 15–18 м/с — оптимальна для збереження балансу між часом польоту та споживанням енергії.
Контроль ключових параметрів у польоті.
- Стан заряду акумуляторної батареї (АКБ):
- постійно відстежуйте вольтаж АКБ з урахуванням:
o швидкості та напрямку вітру;
o наявного навантаження (наприклад, боєприпасу).
- особливості змін під час польоту:
o при польоті до цілі за вітром з навантаженням і без —
витрата АКБ менша, проти вітру більша.
- після скидання навантаження, напруга збільшиться до 1 В, але:
▪ зворотний політ проти вітру вимагатиме більших енергозатрат;
▪ тривалість польоту збільшиться;
▪ потрібно контролювати рівень заряду особливо уважно.
- критичний рівень напруги:
- при менше ніж 20 В — зменшити навантаження на мотори:
▪ летіти на мінімальній стабільній швидкості;
▪ уникати різких маневрів;
▪ за можливості знижуватись по глісаді.
- GNSS-навігація:
- Для стабілізації позиції БпЛА необхідна наявність щонайменше 10-12 супутників.
- При меншій кількості супутників можлива втрата стабілізації.
«Safe mode»
Режим польоту «Safe mode» активується автоматично у випадку одночасної втрати з’єднання між БпЛА та ПДК та відсутності супутникової навігації (GNSS).
Алгоритм дій БпЛА при активації режиму:
- БпЛА зупиняється у повітрі;
- виконує політ у напрямку точки зльоту заздалегідь записаним азимутом старту (орієнтація по компасу, без супутникової навігації, та без урахування похибки відносно вітру);
- очікує відновлення з’єднання з ПДК.
Дії оператора після відновлення зв’язку:
- перейти до одного з режимів ручного керування:
- «Позиція» — якщо супутникова навігація відновлена;
- «GPS off » — у разі продовження глушіння GNSS або спуфінгу.
Важливо! Для коректної роботи даного режиму на початку польоту БпЛА повинен пролетіти щонайменше 200 метрів у напрямку запланованого польоту від точки зльоту при наявності GNSS, щоб контролер зафіксував азимут старту.
Не використовуйте режим «GPS off» до моменту фіксації азимуту старту польотним контролером.
«Flow»- оптична стабілізація
«Flow»-це режим стабілізації БпЛА в просторі за допомогою оптичного сенсора та програмного забезпечення без використання систем супутникової навігації у світлу пору доби, що критично важливо при роботі в умовах дії радіоелектронної боротьби (РЕБ).
Даний режим не використовується для горизонтального польоту, та призначений виключно для утримання позиціонування в просторі.
Оптична стабілізація активується/ деактивується натисканням на кнопку 23 (рис. 3), одночасно в вікні режиму польотів 10 (рис. 3) відобразиться напис «Flow».
Якщо зображення кнопки активації/ деактивації відсутнє на головному екрані «Kazhan Station», то система оптичної стабілізації несправна і її використання неможливе.
Принцип роботи: спеціальне програмне забезпечення і розташована на БпЛА додаткова камера (оптичний сенсор) спрямована вниз до землі, постійно аналізує візуальні орієнтири (контрастні наземні об’єкти, рельєф), на основі даних з якої в реальному часі автоматично коригується і утримується положення БпЛА в просторі, що можливість тримати позицію без використання супутникової навігації.
Система оптичної стабілізації забезпечує:
- ефективне утримання позиції в межах висот від 20м до 200м, навіть при поривах вітру, який не перевищує допустимі параметри для даного типу БпЛА згідно ТТХ;
- точне цілевказання в умовах коли супутникова навігація недоступна;
- ефективну роботу БпЛА без супутникової навігації, що є ключовим при роботі в умовах РЕБ;
- ефективне і безпечне керування БпЛа.
Обмеження при використанні:
- не працює вночі, не працює за метеорологічних умов погіршуючих вертикальну видимість (туман, опади);
o знижується ефективність над лісами, водою або іншими одноманітними поверхнями, де немає чітких орієнтирів.
Важливо ! Потрапляння бруду, пилу або вологи на оптичну поверхню сенсора може призвести до зниження загальної ефективності, а саме зменшення чутливості сенсора, зниження точності та стабільності системи, повної втрати працездатності сенсора і системи в цілому.
«GPS off »
«GPS off»- це режим ручного керування без використання супутникової навігації, в режимі «GPS off» відсутня стабілізація в просторі, утриманням висоти виконується за допомогою барометричного датчика. Призначений для польотів у випадках дії спуфінгу, подавлення засобами РЕБ сигналу супутникової навігації.
Особливості режиму «GPS off»:
- БпЛА ігнорує сигнали супутникової навігації, політ здійснюється виключно під керуванням оператора;
- горизонтальне позиціонування виконується вручну;
- чутливість стіків керування точно відповідає режиму ручного керування «Позиція».
Умови безпечної експлуатації:
- Не рекомендовано використовувати режим «GPS off» до моменту фіксації азимуту старту польотним контролером, що може призвести до неможливості використання режиму «Safe mode».
- Якщо при зльоті БпЛА не зафіксував home point через подавлення супутникової навігації, також якщо при під’єднанні БпЛА до ПДК одразу ввімкнено режим «GPS off », необхідно обов’язково нівелювати роботу (виключити можливість спрацювання) другого ступеню розряду level second voltage (2-й рівень) шляхом зменшення встановленого за замовчуванням рівня вольтажу (рис. 8: захист від розряду АКБ) до значення нижче 19 Вольт.
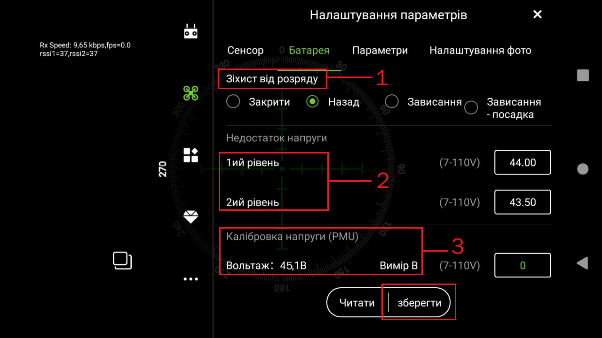
Рис. 8
Важливо: при активації режиму польоту «GPS off» висота відображена в параметрах польоту змінюється з висоти БпЛА відносно точки зльоту на висоту відносно середнього рівня моря, це обов’язково слід враховувати при виконанні польоту.