Правила виконання польоту: Повернення
Повернення БпЛА до стартової точки можливе наступними способами:
1. Повернення по маршруту у 3D автоматичному режимі, який заздалегідь побудований на повернення до точки зльоту.
Цей режим дозволяє виконати повністю автоматизований політ, включаючи автоматичну посадку, за умови :
- наявності стабільного сигналу супутникової навігації (GNSS);
- всі налаштування маршруту повинні бути збережені та активовані до початку польоту.
2. Ручне повернення – використовується режим «Позиція», «GPS off»:
- «Позиція» – за наявності сигналу GNSS, або повної відсутності сигналу GNSS;
- «GPS off» – при спуфінгу, подавленні засобами РЕБ сигналу GNSS.
При наявності сигналу GNSS:
- переведіть БпЛА в режим «Позиція» за допомогою перемикача 9(А) (рис.1);
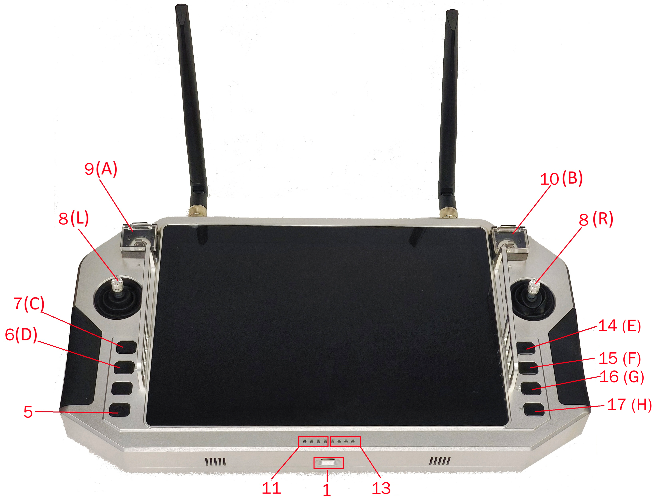
Рис.1. Функціональні кнопки/перемикачі ПДК.
- поверніть БпЛА вручну до точки зльоту;
- зменшіть висоту польоту, притискаючи БпЛА до поверхні;
- після приземлення:
o затисніть стік висоти 8(L) (рис. 1) вниз до максимуму на 5 секунд;
o двигуни вимкнуться автоматично.
При відсутності сигналу GNSS (під час дії РЕБ):
- активуйте режим «GPS off» за допомогою кнопки 4 (рис. 2);

Рис. 2. Автоматичні режим польоту.
- стабілізуйте БпЛА (використовуючи зображення з камери для візуального орієнтування);
- поверніть БпЛА вручну до точки зльоту;
- заходіть на точку зльоту на висоті до 20 м (обов’язково враховуючи висоту перешкод в районі точки приземлення);
- опустіть камеру під кутом 90° для точної візуалізації посадкової точки;
- розпочніть посадку:
- фіксуйте положення БпЛА над точкою за допомогою правого стіка 8(R) (рис.1), компенсуючи вплив вітру;
- плавно знижуйте БпЛА лівим стіком 8(L) до повного торкання землі;
- після посадки затисніть стік висоти 8(L) вниз на 5 секунд для зупинки моторів;
Важливо: заходіть на точку зльоту на висоті до 20 м (обов’язково враховуючи висоту перешкод в районі точки приземлення) – це виключить вихід БпЛА за межі радіовидимісті, що може призвести до необхідності виконання додаткових дій і ускладнення виконання посадки.
3. Автоматичне повернення – режим «Return to Home» (RTH)
Активується через меню автоматичних функцій (рис. 2).
БпЛА:
- автоматично повертається до точки зльоту;
- виконує автоматичну посадку.
Умови роботи:
- режим працює лише при наявності супутникової навігації (GNSS);
- не залежить від місцезнаходження ПДК — орієнтація здійснюється на точку зльоту, а не на пульт.
4. Повернення після завершення польоту в автоматичному режимі- після закінчення місії БпЛА може виконати наступні дії в залежності від встановлених налаштувань:
- Повернутись на точку зльоту та виконати автоматичну посадку.
- Виконати автоматичну посадку на точці яку налаштує оператор.
- Зависнути на останній точці.
5. Режим повернення Safe Mode – даний режим використовується для запобігання втраті БпЛА та автоматично активується у випадку одночасної втрати з’єднання між ПДК та БпЛА і відсутності супутникової навігації. У випадку спрацювання БпЛА автоматично повертається в сторону точки зльоту заздалегідь записаним азимутом старту (орієнтація по компасу, без супутникової навігації, та без урахування похибки відносно вітру).
Після відновлення зв’язку БпЛА необхідно перейти до одного з режимів ручного керування:
- «Позиція» — якщо супутникова навігація відновлена;
- «GPS off » — у разі продовження глушіння GNSS або спуфінгу.
Важливо! Для коректної роботи даного режиму на початку польоту БпЛА повинен пролетіти щонайменше 200 метрів у напрямку запланованого польоту від точки зльоту при наявності GNSS, щоб контролер зафіксував азимут старту.
Не використовуйте режим «GPS off» до моменту фіксації азимуту старту польотним контролером.
Всі режими автоматичного повернення працюють лише з наявною супутниковою навігацією.
Після завершення польоту вимкніть підігрів АКБ якщо він використовувався та перед розміщенням обладнання у кейси, обов’язково виконайте візуальний огляд усіх компонентів на наявність:
- механічних пошкоджень;
- забруднень;
- ознак зносу або деформацій.
При виявленні необхідно вжити заходів до їх усунення.